信息
文章中可能会出现一些错误,希望大佬们可以在评论区指出错误,感谢支持!
01 - 三角形的离散化
三角形图元(Triangle Primitive)
三角形是最基础的多边形,且任何多边形都能拆解为三角形。除此之外,还有优点如下:
- 三角形内一定是平面
- 三角形内部外部定义清晰
- 定义三个顶点后,可以在三角形内做“渐变”(插值)。
经过MVP变换和视口变换,我们已经得到屏幕上三角形的顶点坐标了,接下来该怎么变成对应的像素三角形?
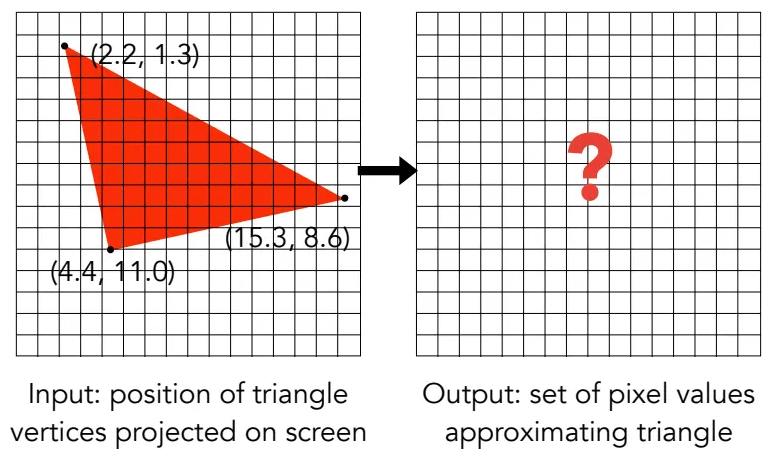
采样(Sampling)
把连续函数离散化的过程,就是采样。
for (int x = 0; x < xmax; ++x)
output[x] = f(x);
在图形学中是很重要的概念,涉及到像素,时间,等等。
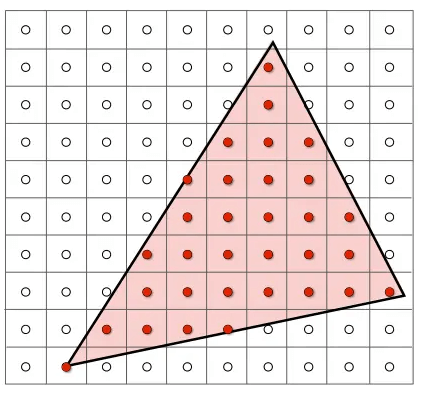
光栅化采样
光栅化采样的目的就是 判断像素中心是否在三角形内。
定义函数原型:
在2D中,可以这样写:
for (int x = 0; x < xmax; ++x)
for (int y = 0; y < ymax; ++y)
image[x][y] = inside(tri, x + 0.5, y + 0.5);
如何判断?使用向量叉乘。(通常)逆时针地,判断点是否在三条边的同侧,如果是的话就在三角形内。
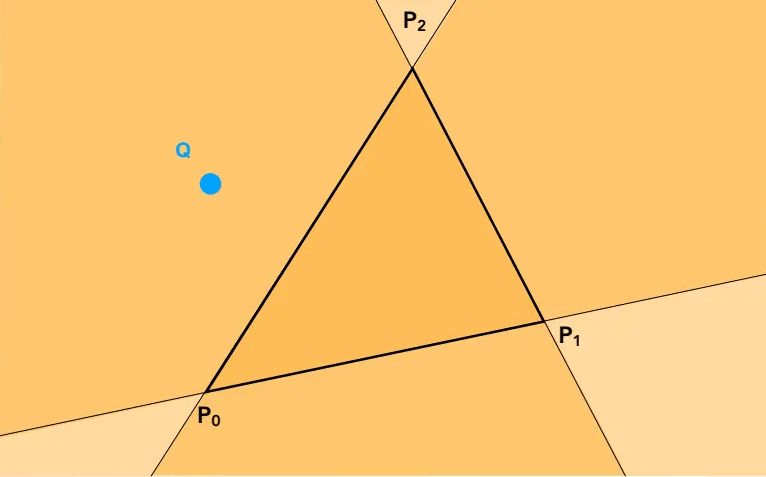
例如上图中,应判断,,是否同向。
PS:如果点在边界上该怎么办,可以不做处理(GAME101),也能做特殊处理(OpenGL, DX)。
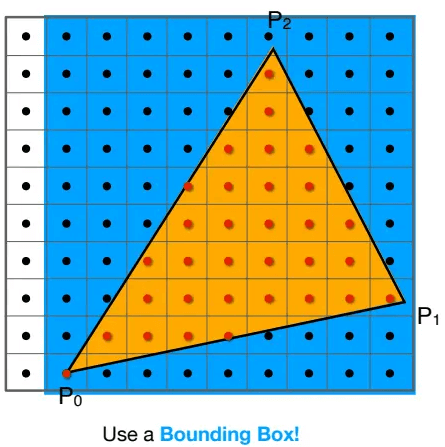
遍历像素点
包围盒(Bounding Box)优化
难道需要遍历整个屏幕上的像素点来完成采样吗,当然不需要,只需划定一小片区域即可,这就是包围盒(BB,也称轴向包围盒AABB):
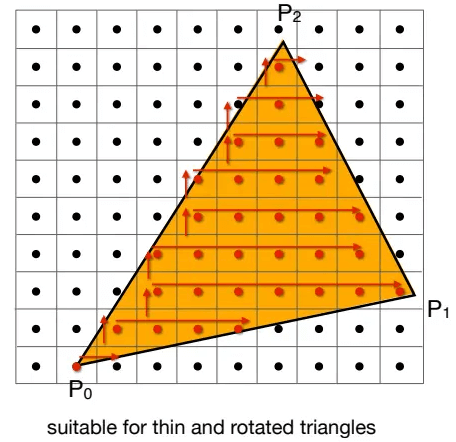
增量三角形遍历(Incremental Triangle Traversal)优化
有时候会碰到又窄又长的三角形,用AABB会浪费很多时间。可以使用此方法进行遍历,相当于给三角形每一行都确定一个AABB,但实现起来难度可能会大。
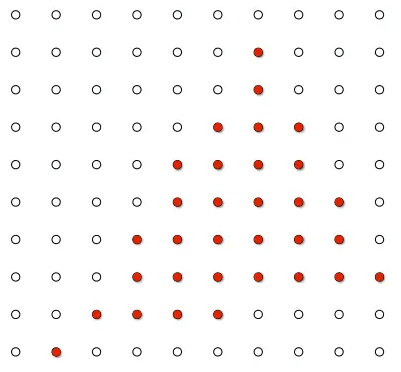
最终采样结果如下:
把他用像素显示出来,却是这个丑样子:
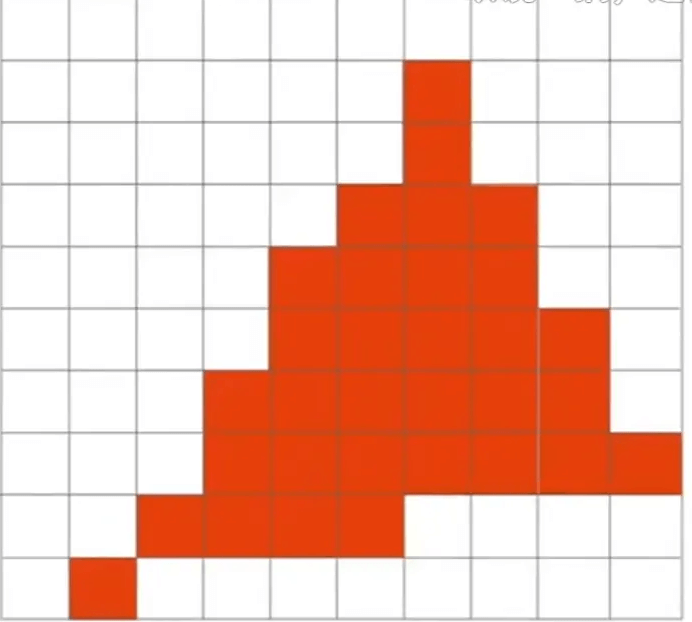
由于像素本身占一定的大小,且我们的采样率不够高,产生走样问题(Aliasing),在图形学中体现为锯齿(Jaggies)。接下来就要抗锯齿/反走样。