向量的定义
数学定义
向量就是一串数字数组,我们通常用列向量的方式来表示它:
a=1234a1=ax=1a2=ay=2a3=az=3a4=aw=4
几何定义
向量是具有 大小 和 方向 的有向线段。
零向量
对于任何给定的向量维度,都有一个特殊的向量,被称为零向量(Zero Vector):
0=000
零向量是特殊的,因为它是唯一的一个大小为零的向量,所有其他向量均具有正大小。此外,零向量也是唯一没有方向的向量。
向量的运算
标量和向量的乘除法
只需用标量乘/除向量的每个分量即可:
kxyzw=kxkykzkw
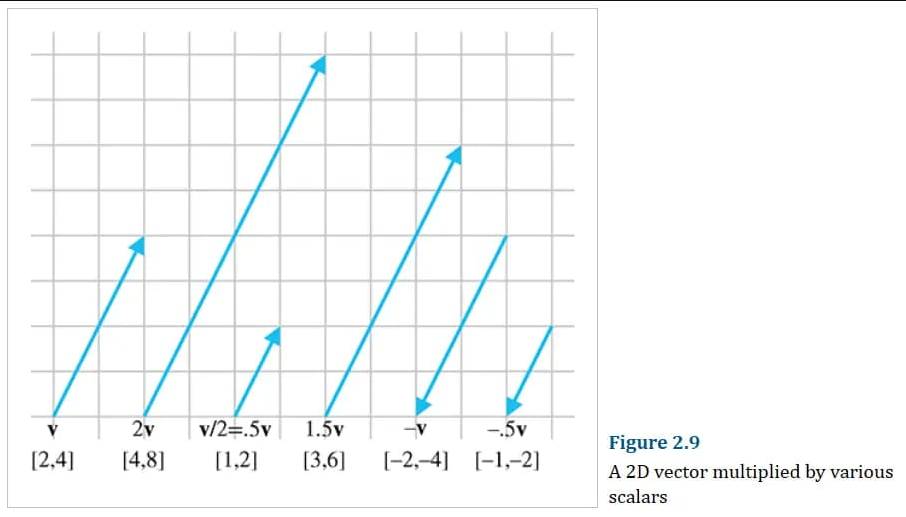
如果还理解不了,可以看看几何解释。在几何上,将向量乘/除标量k,具有将长度缩放∣k∣倍的效果:
向量的加减法
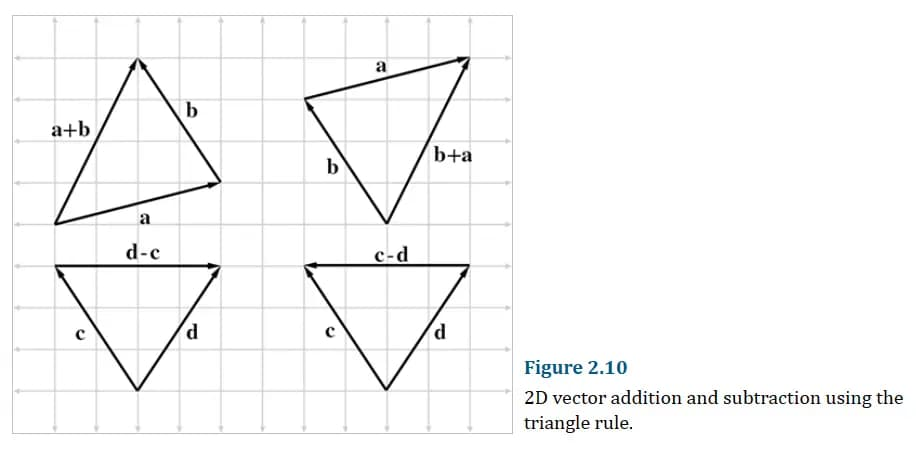
要使两个向量相加/减,只需分别相加/减他们对应的分量即可:
x1y1z1w1±x2y2z2w2=x1±x2y1±y2z1±z2w1±w2
对于几何解释,这里有三角形法则:
向量的大小
向量的大小是其分量的平方和的平方根,以三维向量为例:
∣∣v∣∣=vx2+vy2+vz2
也被称为向量的 范数(Norm)。
对于几何解释,可以用勾股定理来说明(以二维为例,高维度可以推广):
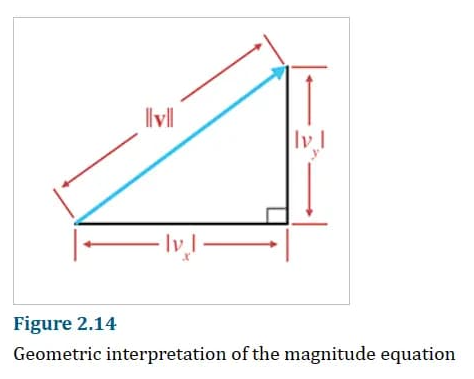
如图,由勾股定理,有:
∣∣v∣∣2=∣vx∣2+∣vy∣2
然后省略右边的绝对值符号,开根号就能得到:
∣∣v∣∣=vx2+vy2
单位向量(Normalized Vector)
有时候,我们只是想用到向量的方向性,而不关注其大小,这时候就能用单位向量(Unit Vector)了。单位向量是大小为1的向量,也被称为标准化向量(Normalized Vector)。
向量标准化的公式如下:
v^=∣∣v∣∣v
需要注意的是,零向量是无法被标准化的。从数学角度,处于零是不对的;在几何角度,标准化零向量会找不到它的方向。
两点间距离公式
两点间距离公式可由向量减法和向量大小推导出来,三维的公式如下:
distance(a,b)=∣∣d∣∣=(bx−ax)2+(by−ay)2+(bz−az)2
向量点积(Dot Product)
向量点积,也称为内积(Inner Product),在游戏编程中无处不在,其也与矩阵乘法、信号卷积、傅里叶变换等运算有着重要联系。点积的公式如下(以二维为例):
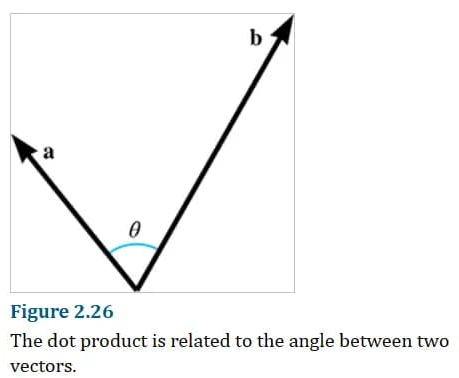
a⋅b=axbx+ayby=∥a∥∥b∥cosθ
向量点积是支持交换律,结合律和分配率的。
向量点积主要有以下用途:
求投影
可以求一个向量到另一个向量的投影:
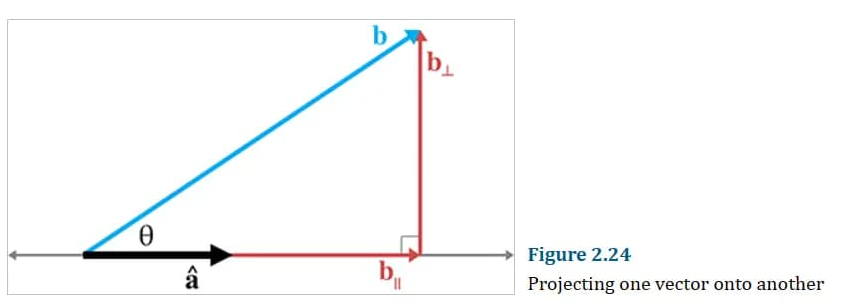
b在a上的投影大小为:
∥b∥∥=∥b∥ cosθ=∥a∥a⋅b
然后乘上 a^ 就好了。
判断相对方向
向量点积结果是个标量,其符号具有判断两向量相对方向的功能:
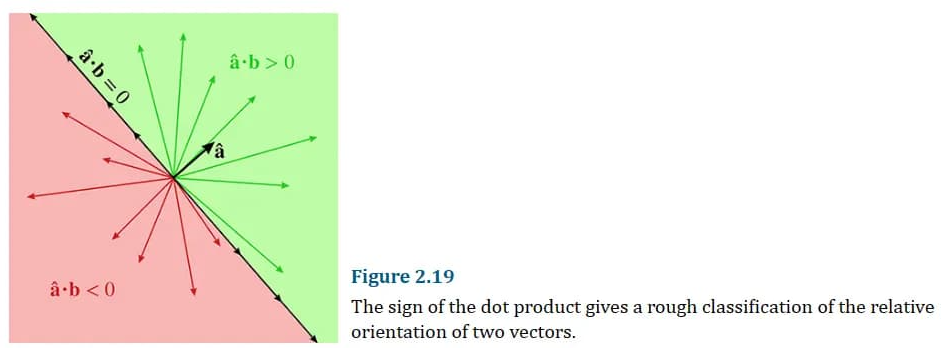
找到两个向量的夹角
由点积公式,可以算出两向量夹角 θ 为:
θ=arccos(∥a∥∥b∥a⋅b)=arccos(a^⋅b^)
计算向量的大小
向量的大小也能通过点积进行计算:
∥v∥=v⋅v
沿某向量进行正交分解
给定以下两个向量:
v,n^
将 v 分解成与 n^ 垂直和平行的分量。
先求平行的,也就是 v 在 n^ 上的投影,已知它的长度为:
∥v∥∥=∥n^∥n^⋅v=n^⋅v
然后再乘上n^即可(因为上边得到的是标量,这里要变成向量):
v∥=n^(n^⋅v)
然后垂直的就简单了:
v⊥=v−v∥
向量叉积(Cross Product)
向量叉积只能在三维中引用,其产生三维矢量并且不是可变换的。
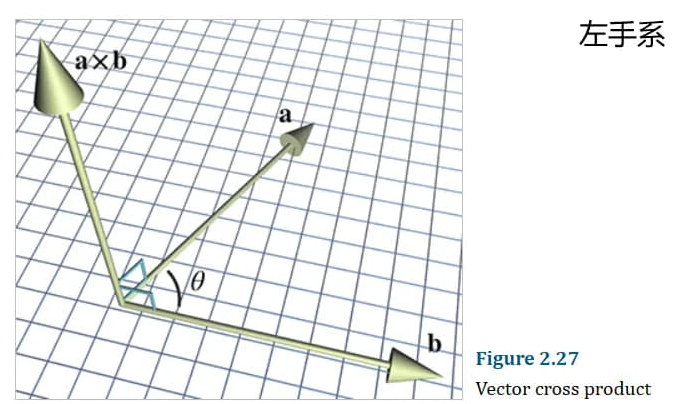
叉积的公式如下:
a×b=x1y1z1×x2y2z2=y1z2−z1y2z1x2−x1z2x1y2−y1x2=0z1−y1−z10x1y1−x10x2y2z2
叉积的大小公式如下:
∥a×b∥=∥a∥∥b∥sinθ
可以得出,当两非零向量平行时,他们叉积的结果为零向量;自己和自己叉积的结果也是零向量。
除此之外,叉积的常见性质如下:
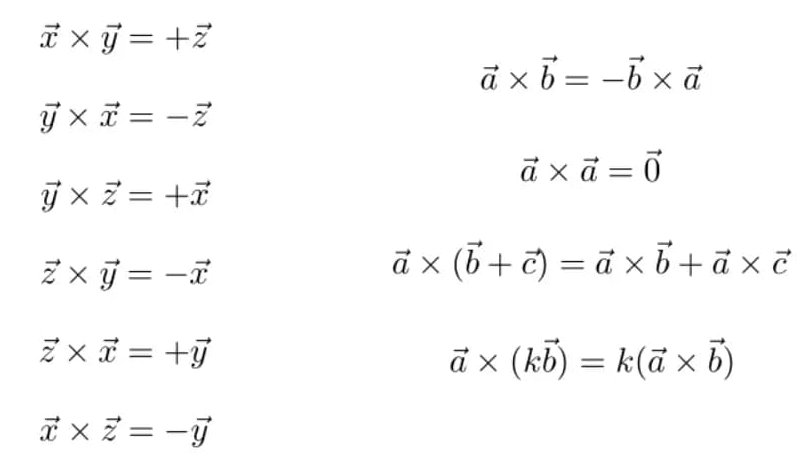
向量叉积主要有以下用途:
判断从向量a到b是什么时针方向转动
可以把b的尾部放到a的头部,然后通过左右手(看坐标系)的大拇指规则来判断:
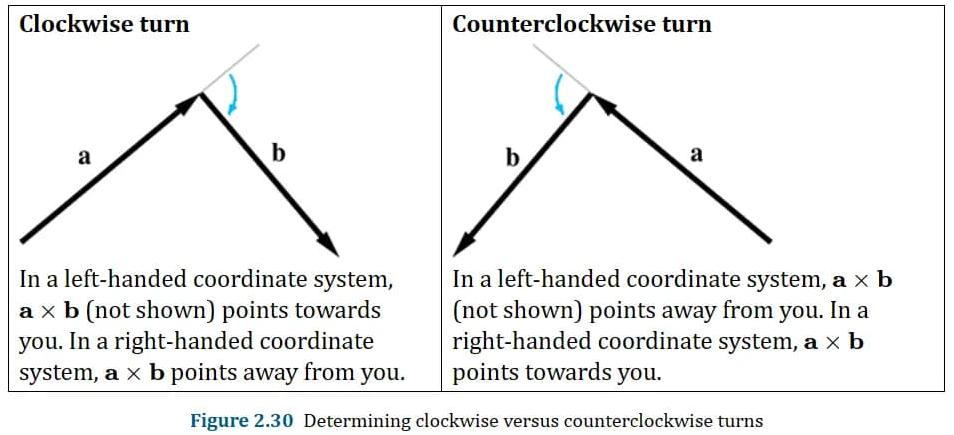
也能用来判断两向量的左/右侧关系。
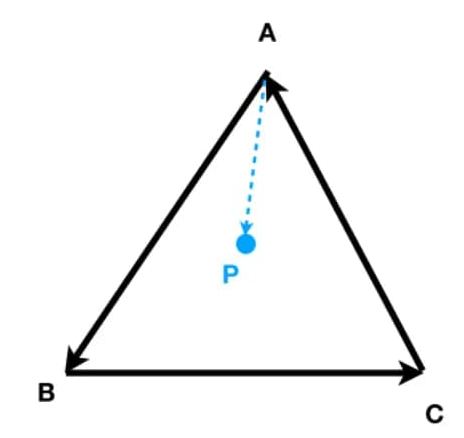
判断点在向量组成的图形内外
绕同一个方向判断这个向量与其他所有向量的左右测关系,如果都一致则在内部。
参考资料