MVP变换
MVP变换就是将三维物体变换到二维中,就像拍照片一样:
- 模型变换(
Model Transformation):模型空间 -> 世界空间,即摆好模型,搭好场景。
- 视图变换(
View Transformation):世界空间 -> 相机空间,即给场景找到一个好的摄影角度。
- 投影变换(
Projection Transformation):相机空间 -> 屏幕空间,即进行拍照,得到照片。
有关模型变换的内容详见上一篇文章。
视图变换
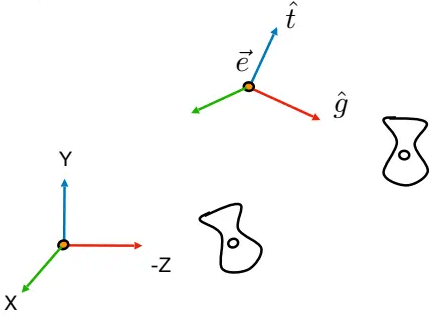
首先,先定义相机(观测矩阵):
- 相机的位置:e
- 相机“看”的方向:g^
- 相机向上的方向:t^
如何进行视图变换?把相机和它所拍摄的场景"移动"到一个规定好的位置即可,这个位置(右手系 )通常为世界坐标的原点,向上为Y,看的方向为-Z:
“移动”的过程如下:
-
将相机e移动到原点(一个简单的平移+引入齐次坐标):
Tview=100001000010−xe−ye−ze1
-
通过旋转,将t^旋转到+Y方向、将g^旋转到−Z方向、将g^×t^旋转到+X方向。
但是仔细想想,把一个方向不规范的坐标空间旋转成方向规范的坐标空间,所需的旋转矩阵应该不好写。因此,可以考虑从规范坐标空间(世界空间)旋转到当前坐标空间(相机空间)的逆矩阵(引入齐次坐标):
Rview−1=∣g^×t^∣∣∣t^∣∣∣−g^∣∣0001=xg^×t^yg^×t^zg^×t^0xt^yt^zt^0x−g^y−g^z−g^00001
由于旋转矩阵是 正交的,那么它的逆矩阵就是它的转置矩阵。因此,最终得到的旋转矩阵为:
Rview=xg^×t^xt^x−g^0yg^×t^yt^y−g^0zg^×t^zt^z−g^00001
将平移操作和旋转操作组合(列向量从右往左),得到的最终矩阵如下:
Mview=RviewTview=xg^×t^xt^x−g^0yg^×t^yt^y−g^0zg^×t^zt^z−g^00001100001000010−xe−ye−ze1
投影变换
接下来进行投影变换,将相机框内的东西拍成一张照片。投影主要分为 正交投影和透视投影两种:
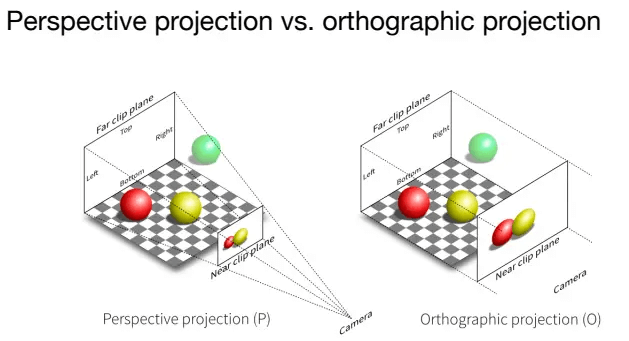
透视投影会带来“近大远小”的现象,而正交投影不会。
正交投影(Orthographic)
正交投影的正式做法如下:
-
定义一个立方体[左l, 右r], [下b, 上t], [远f, 近n],用它框住想要正交投影的所有物体。
-
通过平移和缩放,将该立方体标准化为[−1,1]3:
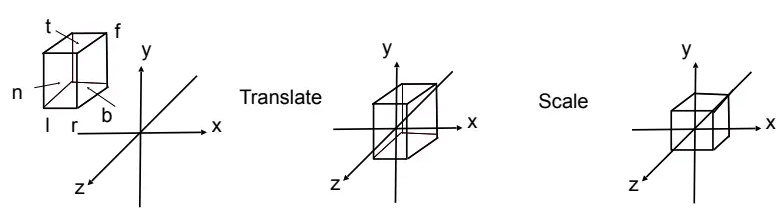
然后,上边变换用矩阵表示就是:
Mortho=r−l20000t−b20000n−f200001100001000010−2r+l−2t+b−2n+f1=r−l20000t−b20000n−f20−r−lr+l−t−bt+b−n−fn+f1
Ps:由于左右手系有些地方不同,如果结果不正确,尝试给Z轴相关的运算取个相反数。
透视投影(Perspective)
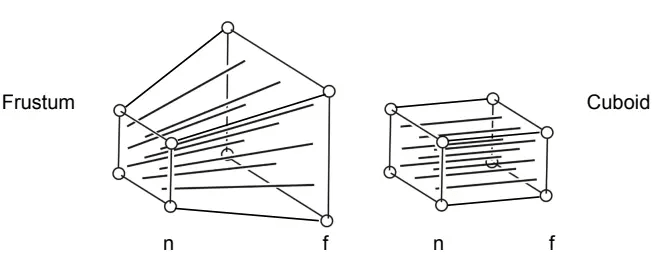
运用得最广泛,满足“近大远小”性质。透视投影可以看出是特殊的正交投影,用“远平面”和“近平面”框住物体,先把“远平面”向“近平面”挤压,挤压成类似于正交投影的小盒子,然后做一次正交投影。
透视投影的做法如下:
-
把“远平面(z)”向“近平面(n)”挤压。规定“近平面”永远不变;挤压时,“远平面”的z值不变,但他俩之间的要发生变化;“远平面”的中心点始终不变。
在挤压过程中,x,y的比例关系(相似三角形)如下:
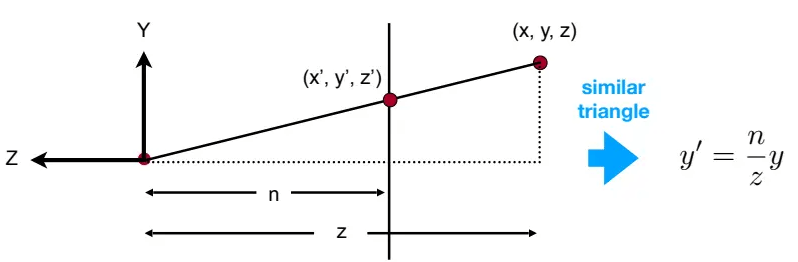
y′=znyx′=znx
引入齐次坐标的概念。假设挤压前,远平面某点为(x,y,z,1)T,经过挤压,它的坐标变为(nx/z,ny/z,?,1)T。根据齐次坐标的性质,该点还能被表示为(同乘z,z不为0)(nx,ny,?,z)T。
现在,挤压前后的点坐标都知道了,剩下求转换矩阵:
M透视→正交(4×4)xyz1=nxny?z
求得:
M透视→正交(4×4)=n0?00n?000?100?0
由于近平面不变,近平面上某点(x,y,n,1)T也不变(n是近平面位置),于是有:
M透视→正交(4×4)xyn1=nxnyn2z
所以缺失的一行应该是这样子的:
[00AB]xyn1=n2
解得
An+B=n2
由于远平面的中心点(0,0,f,1)T是始终不变的(f是远平面位置),同理有:
Af+B=f2
两式联立,解得
A=n+fB=−nf
得到挤压时的转换矩阵:
M透视→正交(4×4)=n0000n0000n+f100−nf0
- 进行正交投影。
最终得到的透视投影矩阵为:
Mper=MorthoM透视→正交=r−l20000t−b20000n−f20−r−lr+l−t−bt+b−n−fn+f1n0000n0000n+f100−nf0=r−l2n0000t−b2n00−r−lr+l−t−bt+bn−fn+f100−n−f2nf0=rn0000tn0000n−fn+f100−n−f2nf0(化简)
如果观察的是Z轴的负方向(如OpenGL),那么投影矩阵是:
Mper=rn0000tn0000n−fn+f−100n−f2nf0
注意:
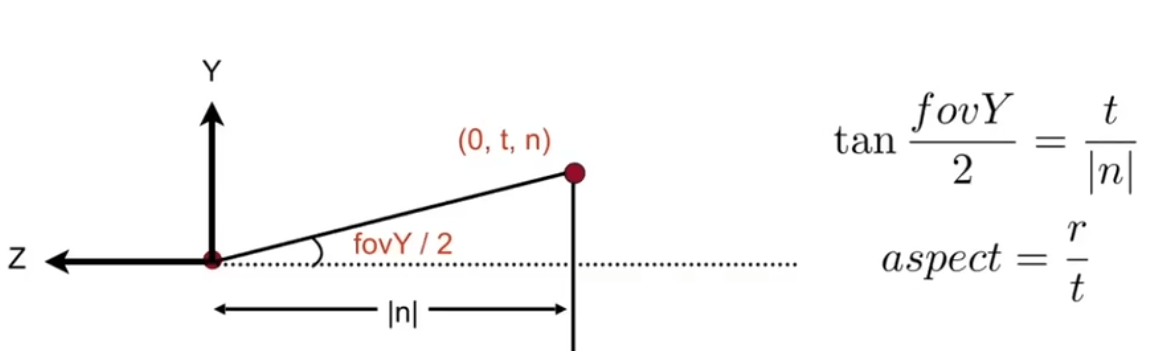
这里有问题,做完西交大图形学实验才知道这里的n,r,f啥的我搞混了,解释一下:左上角两个n对应上图的∥n∥,是摄像机到参考点的距离;右下角的n和f是近平面和远平面距离坐标轴的距离。
一些概念
视锥体(View Frustum)
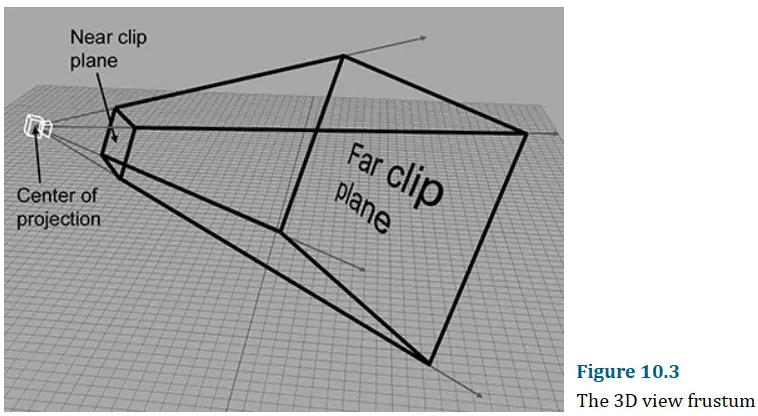
视锥体是相机可能看到的空间体积,它的形状像金字塔,只是尖端被剪掉了。
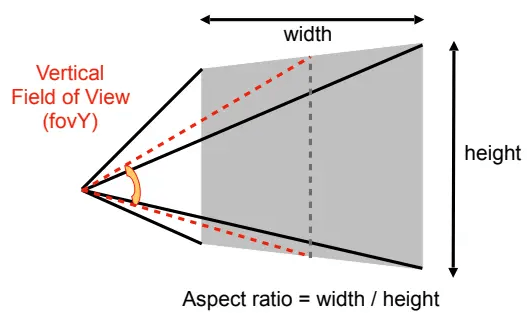
衍生的定义还有:
- 视野(Field Of View,FOV):视锥体截取的角度,分水平和垂直两种。
- 宽高比(Aspect):视锥体矩形截面的宽度与高度的比值。
一般来说,知道宽高比和垂直的fovY,就能定义一个视锥体了。
还能利用它俩推出视锥某矩形截面的l,r,b,t:
透视矩阵也能写成这样:
Mpers=aspect⋅tan(fovY/2)10000tan(fovY/2)10000Znear−ZfarZnear+Zfar100−Znear−Zfar2ZnearZfar0
屏幕(Screen)
- 二维数组,元素为像素
- 数组的大小就是屏幕的分辨率了
- 一种典型的光栅(Raster)成像设备,光栅化(Rasterize)就是把成像内容画到屏幕上。
屏幕空间(Screen Space)
认为屏幕左下角是原点,向右是x,向上是y。
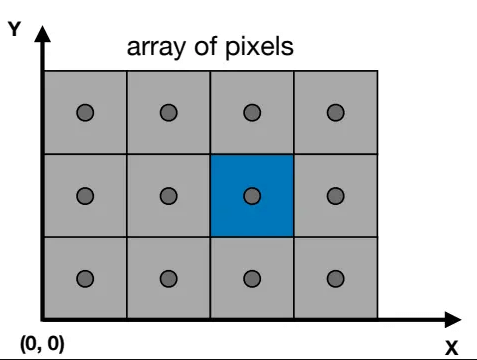
通常有以下规定:
- 像素的坐标是(x, y)形式,x,y都是整数。
- 像素坐标的范围是(0, 0)到(width-1, height-1)。
- 像素的中心位置是(x+0.5, y+0.5)。
- 整个屏幕覆盖(0,0)到(width, height)。
视口变换(Viewport)
将MVP变换后得到的“照片”映射到屏幕空间中。
先不管Z坐标,那么只需将[−1,1]2内的内容变换到[0,width]×[0,height]上就行:
Mviewport=2width00002height0000102width2height01
参考资料